La corporacion del Dr Bervatov surge por un estudio minucioso del mercado actual, los productos del Dr Bervatov han logrado cumplir con los estandares de calidad ademas de cumplir con la espectativa de nuestros clientes de este modo nos logramos posicionar en el mercado, la corporacion busca temas de interes general y desarrollar proyectos de todos los ambitos de estudio pero principalmente en la tecnologia y computo.
El poder desarrollar hardware y software que pueda ayudar a la comunidad y no solo eso tambien apoyamos programas de produccion, programas de desarrollo de arte abstracto y robotica.
La mision de esta corporacion esta en dar a la comunidad un enfoque multidisciplinario y hacer q esta contribuya al desarrollo de habilidades y por su puesto, de conocimiento para proposito general.
Damos la bienvenida en esta creacion de una compañia virtual dedicada a difundir todo tipo de conocimientos, aplicacion de la creatividad y poder divertirse con una actividad algo monopolica (aunque no lo sea). Los estudios de Mercado nos dan la idea de la demanda que un producto podria tener y con esto se puede estimar cuantos clientes potenciales se podrian tener, en base a un estudio e investigacion de campo, cualquier cosa que imaginen solo haganla realidad esa es la filosofia de la Corporacion
sean bienvenidos...!!
martes, 20 de septiembre de 2011
viernes, 15 de abril de 2011
Algo de redes
1. Introducción
El VLSM (Máscara de Subred de Longitud Variable) es una forma para aprovechar nuestras direcciones IP, surgió por que las redes que ha hecho el direccionamiento IPv4 crecían de manera exponencial y esto no permitía el desarrollo y aprovechamiento que se necesita en una red, esto agotaba las direcciones IP hasta que se acabaran. El VLSM permite más efi cacia en la red, subdividiendo esta en más subredes.
Haciendo uso del VLSM vamos a crear una red y construir un escenario que nos sirva para este problema.
El problema consiste en lo siguiente.
Tenemos 3 departamentos los cuales necesitan cada uno cierto número de host para sus computadoras,
distribuidos de la siguiente manera:

Para lo cual vamos hacer uso de este escenario:

Construyendo este escenario podemos darnos cuenta de los dispositivos intermedios que vamos a usar,para este escenario hemos usado un router, 5 switches y 64 computadoras; el router nos servirá para comunicarnos entre subredes ya que este elije la ruta más adecuada para la comunicación en este caso entre subredes mientras que los switches los ocupamos para interconectar varios dispositivos en este caso
muchas computadoras y otro switch, se le considera un dispositivo inteligente ya que este es capaz deenviar datos con presición y aumenta la confi abilidad en la red.
El router solo tiene 2 entradas de fastEthernet es por esto que nos vemos en la necesidad de colocar una entrada más para esto damos doble click en el router y nos aparecerá los siguiente:
 En esta figura podemos ver que hay un interruptor, el cuál deberemos de apagar, y agregar la entrada que necesitamos como se puede ver en la siguiente fi gura:
En esta figura podemos ver que hay un interruptor, el cuál deberemos de apagar, y agregar la entrada que necesitamos como se puede ver en la siguiente fi gura:
 Encerrado en rojo tenemos el tipo de entrada que agregamos, esta la seleccionamos,y en la parte inferior derecha tenemos la pieza que vamos a agregar al router, esta la arrastramos con el mouse hasta colocarla en un lugar libre.
Encerrado en rojo tenemos el tipo de entrada que agregamos, esta la seleccionamos,y en la parte inferior derecha tenemos la pieza que vamos a agregar al router, esta la arrastramos con el mouse hasta colocarla en un lugar libre.
Con estos datos vamos hacer el direccionamiento VLSM para así poder con gurar nuestra red asignando direcciones IP a cada dispositivo empleado, además considerar las direcciones de "gateway"que también nos serán necesarias pero primero calculemos los host que vamos a utilizar.
Las máscaras de subred se obtienen a partir de la clase de red en este caso es de clase C y a este le corresponde una máscara de red /24, esto es por que tenemos 4 octetos y los primeros 3 son de red y el último es de host. Si pedimos bits prestados del host para crear mas redes es cuando modi camos la máscara de red, por ejemplo si tenemos que nuestra red principal tiene 256 direcciones y queremos dividir esta en 2 subredes basta con pedir un bit prestado, si queremos todavía dividir esta a la mitad, pedimos otro bit prestado y así sucesivamente, como se muestra en lo siguiente:
Para una red de clase C tenemos la máscara de red 255.255.255.0=/24, es decir todas las porciones de red encendidas, supongamos que pedimos un bit prestado, visto de esta manera:
255.255.255.10000000 , este último número lo tenemos en binario pero al pasarlo a decimal tenemos lo siguiente:
255.255.255.128 , ya que hemos pedido un bit prestado, este corresponde a la máscara de red /25. Utilizando este criterio hacemos este direccionamiento como se muestra en la siguiente tabla.
 Con esta información podemos construir el diagrama VLSM y de esta manera poder realizar este direccionamiento, el diagrama es el que se muestra a continuación:
Con esta información podemos construir el diagrama VLSM y de esta manera poder realizar este direccionamiento, el diagrama es el que se muestra a continuación:
 En este diagrama podemos apreciar cuantos host va a ocupar cada departamento, además de ver las subdivisiones que se van a realizar para el direccionamiento VLSM.
En este diagrama podemos apreciar cuantos host va a ocupar cada departamento, además de ver las subdivisiones que se van a realizar para el direccionamiento VLSM.
Una vez hecho esto procedemos a hacer dicho direccionamiento, basta ver que con el número total de host que en total son 752, nos basta usando una red de clase C y para ello proponemos una dirección IP de esta clase por ejemplo usaremos la 194.2.0.0, sabemos que por default la mascara de red es /24, con
lo cuál haciendo el direccionamiento obtenemos lo siguiente:

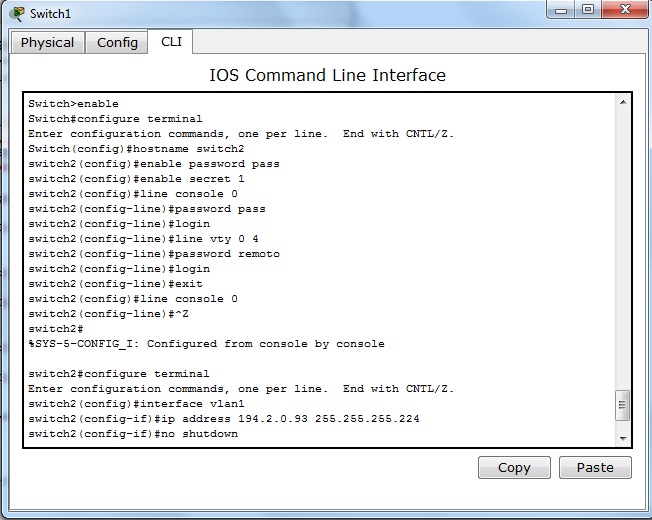
Teniendo estos datos procedemos a con gurar nuestros dispositivos, utilizando estas direcciones IP que nos proporcionó el direccionamiento VLSM, para ello comenzamos confi gurando el switch1 el cual se usará en el departamento de Sistemas.
-Del rango de host la última dirección IP del intervalo va a ser la dirección gateway.
-Estas direcciones gateway van a estar en todas las computadoras dependiendo de la subred de donde se ubique.
-El router también deberá tener las direcciones gateway de las diferentes subredes.
En esta tabla se muestra la asignación de direcciones IP:
 Una vez asiganadas las direcciones IP tanto de host como de gateway y las direcciones de los dispositivos
Una vez asiganadas las direcciones IP tanto de host como de gateway y las direcciones de los dispositivos
procedemos a hacer las con figuraciones de estos dispositivos
A continuación se muetra la con figuración de los dispositivos:
1. Se con figuran los switches, para esto usamos el IOS:





2. Con figuramos los routers, a estos les asignamos las IP de gateway de las demás subredes, a continuación se muestra la con figuración de estos:


 Ahora que ya tenemos con figurado nuestro escenario completamente mandamos un mensaje para probar nuestra subred, en este caso mandaremos un mensaje del departamento de ventas hacia el de sistemas como se muestra en las siguientes figuras:
Ahora que ya tenemos con figurado nuestro escenario completamente mandamos un mensaje para probar nuestra subred, en este caso mandaremos un mensaje del departamento de ventas hacia el de sistemas como se muestra en las siguientes figuras:


Ahora enviemos un mensaje de producción hacia ventas:







Los mensajes anteriores fueron enviados usando el protocolo ICMP, este se encarga de informar al origen si se ha producido un error durante la entrega de su mensje. Pero no sólo se encarga de notifi car los errores, si no que también transporta distintos mensajes de control. Para que las direcciones físicas se puedan conectar con las direcciones lógicas, el protocolo ARP interroga a los equipos de la red para averiguar sus direcciones físicas y luego crea una tabla de búsqueda entre las
direcciones lógicas y físicas en una memoria caché.
Sabiendo esto ahora podemos visualizar el envío de un mensaje utilizando el protocolo ARP, este permite que se conozca la dirección física de una tarjeta de interfaz de red correspondiente a una dirección IP.
Por ejemplo enviemos un mensaje del departamento de ventas hacia el de producción:



Conclusiones:
La implementación de este método llamado VLSM es una solución al problema de las direcciones IP ya que sin la utilización de este método no se podría aprovechar al máximo una dirección de red; haciendo este ánalisis nos ahorramos el uso de más direcciones de red ya que consiste en subdividir la subred en subredes más pequeñas; en pocas palabras ayuda a tener menos desperdicio. Construyendo un escenario
nos da mayor perspectiva de lo que es una subred, y en cuanto al uso de dispositivos intermedios así como el router y los switches, que tanto espacio nos va a ocupar en una red, también haciendo uso de distintos tipos de direcciones IP no solo de subred o de broadcast si no que también la dirección gateway que es la que nos permite en este caso comunicarnos a una subred diferente.
Por otra parte hemos decidido usar switches como dispositivos intermedios ya que estos como se consideran dispositivos inteligentes nos puede mandar un mensaje sin error y al objetivo deseado, esto hace que aumente la con fiabilidad en la red, la señal se atenúa menos, ya que si hubiésemos decidido usar un HUB la señal se nos distorcionaría. En cuanto al uso del router este siempre elige la ruta más adecuada
para el envío de información, de esta forma todo nuestro hardware en conjunto trabaja de forma más adecuada ya que se eligió lo que mejor funcionara para dicho escenario, en este tipo de redes las cantidades de host podrían ser más extensas por lo que la cantidad de dispositivos intermedios puede aumentar.
En cuanto a la topología de este tipo de red es de tipo estrella, ya que los hosts los tenemos conectados alrededor de nuestros dispositivos intermedios, esto establece un punto entre nuestros dispositivos intermedios en especial los routers que son los que hacen comunicación entre otras subredes(en este caso).
Esto lo apreciamos mejor cuando se envía un mensaje con el protocolo ARP, este envía mensajes a todas las computadoras que esten interconectadas por medio de un dispositivo intermedio y solo el destinatario recibe el mensaje mientras que todas las demás lo rechaza, esto pasa por que se comparan tanto direcciones físicas como lógicas y de esta manera encontrar el destinatario a diferencia del protocolo ICMP sólo se encarga de transportar es por eso que se ve el envío directo en la simulación.
El VLSM (Máscara de Subred de Longitud Variable) es una forma para aprovechar nuestras direcciones IP, surgió por que las redes que ha hecho el direccionamiento IPv4 crecían de manera exponencial y esto no permitía el desarrollo y aprovechamiento que se necesita en una red, esto agotaba las direcciones IP hasta que se acabaran. El VLSM permite más efi cacia en la red, subdividiendo esta en más subredes.
Haciendo uso del VLSM vamos a crear una red y construir un escenario que nos sirva para este problema.
El problema consiste en lo siguiente.
Tenemos 3 departamentos los cuales necesitan cada uno cierto número de host para sus computadoras,
distribuidos de la siguiente manera:

Para lo cual vamos hacer uso de este escenario:

Construyendo este escenario podemos darnos cuenta de los dispositivos intermedios que vamos a usar,para este escenario hemos usado un router, 5 switches y 64 computadoras; el router nos servirá para comunicarnos entre subredes ya que este elije la ruta más adecuada para la comunicación en este caso entre subredes mientras que los switches los ocupamos para interconectar varios dispositivos en este caso
muchas computadoras y otro switch, se le considera un dispositivo inteligente ya que este es capaz deenviar datos con presición y aumenta la confi abilidad en la red.
El router solo tiene 2 entradas de fastEthernet es por esto que nos vemos en la necesidad de colocar una entrada más para esto damos doble click en el router y nos aparecerá los siguiente:


Con estos datos vamos hacer el direccionamiento VLSM para así poder con gurar nuestra red asignando direcciones IP a cada dispositivo empleado, además considerar las direcciones de "gateway"que también nos serán necesarias pero primero calculemos los host que vamos a utilizar.
Las máscaras de subred se obtienen a partir de la clase de red en este caso es de clase C y a este le corresponde una máscara de red /24, esto es por que tenemos 4 octetos y los primeros 3 son de red y el último es de host. Si pedimos bits prestados del host para crear mas redes es cuando modi camos la máscara de red, por ejemplo si tenemos que nuestra red principal tiene 256 direcciones y queremos dividir esta en 2 subredes basta con pedir un bit prestado, si queremos todavía dividir esta a la mitad, pedimos otro bit prestado y así sucesivamente, como se muestra en lo siguiente:
Para una red de clase C tenemos la máscara de red 255.255.255.0=/24, es decir todas las porciones de red encendidas, supongamos que pedimos un bit prestado, visto de esta manera:
255.255.255.10000000 , este último número lo tenemos en binario pero al pasarlo a decimal tenemos lo siguiente:
255.255.255.128 , ya que hemos pedido un bit prestado, este corresponde a la máscara de red /25. Utilizando este criterio hacemos este direccionamiento como se muestra en la siguiente tabla.


Una vez hecho esto procedemos a hacer dicho direccionamiento, basta ver que con el número total de host que en total son 752, nos basta usando una red de clase C y para ello proponemos una dirección IP de esta clase por ejemplo usaremos la 194.2.0.0, sabemos que por default la mascara de red es /24, con
lo cuál haciendo el direccionamiento obtenemos lo siguiente:

Teniendo estos datos procedemos a con gurar nuestros dispositivos, utilizando estas direcciones IP que nos proporcionó el direccionamiento VLSM, para ello comenzamos confi gurando el switch1 el cual se usará en el departamento de Sistemas.
-Del rango de host la última dirección IP del intervalo va a ser la dirección gateway.
-Estas direcciones gateway van a estar en todas las computadoras dependiendo de la subred de donde se ubique.
-El router también deberá tener las direcciones gateway de las diferentes subredes.
En esta tabla se muestra la asignación de direcciones IP:

procedemos a hacer las con figuraciones de estos dispositivos
A continuación se muetra la con figuración de los dispositivos:
1. Se con figuran los switches, para esto usamos el IOS:




2. Con figuramos los routers, a estos les asignamos las IP de gateway de las demás subredes, a continuación se muestra la con figuración de estos:





Ahora enviemos un mensaje de producción hacia ventas:







Los mensajes anteriores fueron enviados usando el protocolo ICMP, este se encarga de informar al origen si se ha producido un error durante la entrega de su mensje. Pero no sólo se encarga de notifi car los errores, si no que también transporta distintos mensajes de control. Para que las direcciones físicas se puedan conectar con las direcciones lógicas, el protocolo ARP interroga a los equipos de la red para averiguar sus direcciones físicas y luego crea una tabla de búsqueda entre las
direcciones lógicas y físicas en una memoria caché.
Sabiendo esto ahora podemos visualizar el envío de un mensaje utilizando el protocolo ARP, este permite que se conozca la dirección física de una tarjeta de interfaz de red correspondiente a una dirección IP.
Por ejemplo enviemos un mensaje del departamento de ventas hacia el de producción:



Conclusiones:
La implementación de este método llamado VLSM es una solución al problema de las direcciones IP ya que sin la utilización de este método no se podría aprovechar al máximo una dirección de red; haciendo este ánalisis nos ahorramos el uso de más direcciones de red ya que consiste en subdividir la subred en subredes más pequeñas; en pocas palabras ayuda a tener menos desperdicio. Construyendo un escenario
nos da mayor perspectiva de lo que es una subred, y en cuanto al uso de dispositivos intermedios así como el router y los switches, que tanto espacio nos va a ocupar en una red, también haciendo uso de distintos tipos de direcciones IP no solo de subred o de broadcast si no que también la dirección gateway que es la que nos permite en este caso comunicarnos a una subred diferente.
Por otra parte hemos decidido usar switches como dispositivos intermedios ya que estos como se consideran dispositivos inteligentes nos puede mandar un mensaje sin error y al objetivo deseado, esto hace que aumente la con fiabilidad en la red, la señal se atenúa menos, ya que si hubiésemos decidido usar un HUB la señal se nos distorcionaría. En cuanto al uso del router este siempre elige la ruta más adecuada
para el envío de información, de esta forma todo nuestro hardware en conjunto trabaja de forma más adecuada ya que se eligió lo que mejor funcionara para dicho escenario, en este tipo de redes las cantidades de host podrían ser más extensas por lo que la cantidad de dispositivos intermedios puede aumentar.
En cuanto a la topología de este tipo de red es de tipo estrella, ya que los hosts los tenemos conectados alrededor de nuestros dispositivos intermedios, esto establece un punto entre nuestros dispositivos intermedios en especial los routers que son los que hacen comunicación entre otras subredes(en este caso).
Esto lo apreciamos mejor cuando se envía un mensaje con el protocolo ARP, este envía mensajes a todas las computadoras que esten interconectadas por medio de un dispositivo intermedio y solo el destinatario recibe el mensaje mientras que todas las demás lo rechaza, esto pasa por que se comparan tanto direcciones físicas como lógicas y de esta manera encontrar el destinatario a diferencia del protocolo ICMP sólo se encarga de transportar es por eso que se ve el envío directo en la simulación.
jueves, 9 de diciembre de 2010
PROYECTO BRAZO MECÁNICO
INTRODUCCIÓN:
En este proyecto implementaremos el diseño y programación de un brazo mecánico así como las etapas e interfaces de uso para controlarlo, en este caso he decidido hacer uso de material de desecho para fabricarlo, el diseño de dicho robot puede variar ya que puede haber muchos diseños y otros funcionamientos de los mecanismos, en la etapa de control usaremos la computadora; posteriormente explicaremos cómo será la etapa de control. Mientras que en la etapa de potencia usamos circuitos que nos permiten el funcionamiento, control y manejo de potencia de nuestro dispositivo que en este caso son cuatro motores de corriente continua, además se usa un servomotor el cual tendrá otro forma de controlarse, en este caso solo abarcaremos poco de ese tema que se piensa implementarlo con el uso de una gal 22v10.
Algunos materiales usados en la construcción de este brazo son:
*-2 motorreductores de corriente continua de alto torque.
*-1 motorreductor de corriente continua de bajo torque.
*-1 motorreductor para la base (este puede variar en su diseño)
*-1 servomotor
*-1 freno de bicicleta en desuso
*-Espárragos de ¼ “ (cuerdas sin fin)
*-2 Piezas de transmisión(hay que fabricarlas)
*-2 coples (hay que fabricarlos)
*-Tornillos de ¼ “ por 2”
*-Solera de aluminio
*-Cables
*-1 Placa de metal
*-1 resorte(opcional)
Nota: estos materiales como son de desecho no se le especifica las características ya que el diseño depende de los materiales que se quieran usar.
El diseño del brazo mecánico es el siguiente:

Este es un diseño realizado con una herramienta computacional de dibujo llamada google sketch-up pero a continuación mostrare una foto real del brazo mecánico:
En esta foto podemos apreciar el diseño real del brazo mecánico con el servo agregado, teniendo en cuenta estos planos podemos llevar a cabo este diseño siempre cuidando de la metrología que se le dé a este así como la distribución de sus componentes y dispositivos de trabajo que se van a utilizar en este caso nuestros cuatro motores de corriente continua y un servomotor.

En esta foto podemos ver que los motores que están encerrados en rojo corresponden a los motores de corriente continua mientras que el que está encerrado en amarillo corresponde al servomotor.
El mecanismo consta:
· *- Primeramente del motor de la base el cual es un reductor que nos permitirá girar la base con una libertad de 360°.
· *- Luego los motores que están al costado del brazo son motores con caja reductora de alto torque, donde su flecha esta acoplada a una cuerda sin fin, este cople fue previamente fabricado en el torno y se hizo a medida esta parte nos ofrece una libertad de movimiento de aproximadamente 60°.
· *-Tenemos el servomotor que en este caso nos servirá como muñeca del brazo su libertad de giro es de 180°.
*-Y con el mismo mecanismo de cuerda sin fin y cople tenemos otro motor de corriente continua con reductora, el cual nos permite cerrar la pinza de sujeción del robot, cabe mencionar que dicha pinza de sujeción fue hecha con un freno de bicicleta en desuso.
Pero también se preguntaran ¿Cómo es que se transmite el movimiento?
Bueno la respuesta está en la siguiente imagen:

En esta imagen tenemos la unión de las piezas mecánicas que estamos usando en este caso la que está señalada con la flecha azul mostramos la cuerda que está acoplada al motor de corriente continua y en el círculo rojo mostramos la pieza que une la estructura del robot con la cuerda, esta pieza tiene internamente un roscado que previamente se le hizo cuando se fabricó con un machuelo.
En base a esto tenemos que cuando estos motores giran pueden apretar o aflojar la cuerda causando que las partes del brazo se muevan hacia arriba, hacia abajo o en el caso de la pinza que la apriete o la afloje.
Nota: los materiales que se usaron son de desecho, los motores utilizados en la estructura del brazo pueden trabajar a un voltaje máximo de 24 volts, el motor de la pinza y el de la base a un voltaje máximo de 7 volts y el servomotor 5 volts.
ETAPA DE POTENCIA.
"La etapa de potencia consta de la fabricacion de 2 puentes h para dos motores publicados anteriormente en este mismo blog..."ETAPA DE CONTROL
Ahora teniendo ya definida nuestra etapa de potencia vamos a controlar los motores usando nuestros circuitos, en este caso para mover el puente h necesitaremos de pulsos digitales, los cuales los vamos a obtener con el puerto paralelo de la computadora, para ello vamos a hacer uso de nuevos materiales, además de contar con una interfaz de programación la cual asignara una salida hacia el puerto paralelo de la computadora.
Por lo cual definiremos el puerto paralelo:
Un puerto paralelo es una interfaz entre una computadora y un periférico, cuya principal característica es que los bits de datos viajan juntos, enviando un paquete de byte a la vez. Es decir, se implementa un cable o una vía física para cada bit de datos formando un bus. Mediante el puerto paralelo podemos controlar también periféricos como focos, motores entre otros dispositivos, adecuados para automatización.
El cable paralelo es el conector físico entre el puerto paralelo y el dispositivo periférico. En un puerto paralelo habrá una serie de bits de control en vías aparte que irán en ambos sentidos por caminos distintos.
En contraposición al puerto paralelo está el puerto serie, que envía los datos bit a bit por el mismo hilo.
Todo sistema para el procesamiento de datos se encuentra comunicado con los dispositivos externos a través de los puertos. La arquitectura del procesador 8086 determina una cantidad de hasta 65,536 puertos, sin embargo solo se usan 1024. Las instrucciones que utiliza el CPU para comunicarse con los puertos son IN y OUT. La primera permite transferir un valor desde un puerto específico hasta el registro
AX o AL y la segunda en viceversa. Siempre se usa el registro AX (acumulador) en las operaciones con los puertos (ya sea que la operación sea de lectura o escritura).
También el BIOS permite usar todos los puertos paralelos, LPT1, LPT2, y LPT3. Para usar el servicio de estos puertos, se coloca el número de función dentro del registro AH y el código correspondiente al puerto paralelo dentro del registro DX. El valor 0 corresponde al LPT1, 1 al LPT2, y 2 al LPT3.
El puerto paralelo consta de 8 líneas de salida, que no pueden ser seteados como entradas, además de 5 entradas de control estando uno de estos invertido, y 4 salidas estando tres invertidas las cuales son de colector abierto por lo cual pueden manejar mayor corriente que las demás terminales (estas 4 salidas pueden ser utilizadas también como entradas por lo que usted puede tener hasta 9 terminales de entrada si las combina con las entradas de control).
La especificación de los pines se muestra a continuación.
Pines del puerto paralelo.
· Registro de datos (8 pines de salida para los bits de datos (D0 – D7 Direcciones: 378))
· Registro de estado (5 pines de entrada (uno invertido) para acceder al estado del puerto.(S3 – S7 Direcciones-:379))
· Registro de control (4 pines de salida o entrada (tres invertidos) para acceder al control del puerto. (C0 – C3 Direcciones: 37A))

En este caso usaremos los 8 bits de salida de nuestro puerto paralelo ya que vamos a controlar 4 motores de corriente continua y cada uno necesita de 2 bits para rotar y poder invertir su rotación.

A continuación se mostraran algunos materiales usados para realizar esta etapa:
· *.Conector macho db-25
· *- Cable plano
· *- 8 Leds

{kind=link}
Este material fue usado de la siguiente manera:
El cable plano es ponchado al conector db-25 macho asegurándose que las patas de salida hagan contacto, los leds los conectamos hacia las patas de salida y la terminal negativa hacia cualquiera de las patas de tierra de nuestro puerto de esta forma cuando nuestro programa haga que las salidas se activen los leds se encenderán
Esto lo hacemos para asegurarnos que los bits de salida realmente se estén mandando del puerto hacia nuestro circuito de control, basta ahora recordar que el puente h se maneja por medio de pulsos digitales, estos pulsos son los que se van a mandar desde el puerto paralelo y la manera de enviarlos se hará mediante un programa que nos permita enviarlos, en este caso usaremos una interfaz sencilla llamada Visual Basic 6.0.
PROGRAMACIÓN DE LAS SALIDAS DEL PUERTO.
Haciendo la programación de nuestras salidas podemos controlar nuestro dispositivo final que en este caso es el robot controlando los motores haciendo el uso de pulsos digitales enviados desde la PC usando una interfaz de programación por lo cual definiremos la programación que se utilizara que en este caso es la programación orientada a eventos.
Programación.
La programación orientada a eventos me permite generar programas los cuales responden a una acción que el usuario ejecuta sobre un objeto en la pantalla, esto lo podemos apreciar mejor con el siguiente diagrama.

Aquí tenemos que un evento se va a ejecutar sobre un objeto y este objeto nos responderá con un método.
Antes de programar algo nos debemos de hacer dos preguntas:
1.- ¿Qué quiero que pase?
2.- ¿Cuándo quiero que pase?
En este caso la respuesta de la primer pregunta será la salida de nuestro puerto y la respuesta de la segunda será cuando ejecute una acción sobre un objeto en este caso serán los botones de nuestra interfaz así es como funciona la programación orientada a eventos.
nota: antes de definir nuestra interfaz de programación que en este caso es la herramienta Visual Basic 6.0 necesitamos un archivo que debe ser alojado en la carpeta: C:\Windows\system y ademas en el codio hay que declarar en General Declarations el archivo txt io-readme, este archivo lo podran descargar desde aqui:

Interfaz de usuario.

En esta forma se crearon los botones con las diferentes acciones que se van a ejecutar sobre ellos lo que nos permitirá controlar nuestro robot con los pulsos digitales mandados desde el puerto paralelo que a su vez serán mandados ejecutando una acción sobre estos botones en este caso basta con dar un simple click a estos.
El código para mandar estos bits hacia el puerto es el siguiente:



Con la instrucción portOut (&H378), (No de bit) asignada a cada botón con la dirección H378 hacemos referencia a la dirección del puerto paralelo mientras que el número que está a continuación corresponde al número de bit que se le va a asignar.
Nótese que las salidas las insertamos en el programa de manera decimal pero la salida hacia el puerto lo hará en forma binaria además que podemos sumar dichos números para obtener otro bit que nos permitirá obtener 2 tareas a la vez pero a la vez existen combinaciones no válidas.

Aquí en esta tabla podemos ver el número de bit así como valor decimal, los unos nos indican un bit encendido que a su vez tendrá asignado una entrada hacia el puente h para así poder mover un motor, en este caso hay combinaciones no validas que son el resultado de la suma de dos bits un ejemplo de una combinación no valida es aquella que tiene como fin mandar 2 bits que se dirijan al puente h pero que estos 2 bits me indiquen girar un motor a ambos lados al mismo tiempo esto sucedería por ejemplo si mandamos un 3, este tipo de situaciones las habíamos indicado antes en el anexo del circuito puente h.

Nota: El 255 solo hay que usarlo antes de conectar el puente h, solo sirve para probar que todos los bits de salida funcionen correctamente.
Nota2: en el servomotor ahora no se considerara su control pero posteriormente se implementara una forma de control. sigan este blog y posteriormente se hara dicha implementacionpor lo pronto es todo gracias...!
FUNCIONAMIENTO DEL ROBOT:
ESTE DOCUMENTO LO PODRAS VISUALIZAR DESDE AQUI MISMO:

REFERENCIAS:
http://mecatronica.li2.uchile.cl/Manual.pdf
http://mimosa.pntic.mec.es/~flarrosa/puerto.pdf
http://www.forosdeelectronica.com/f26/usar-puerto-paralelo-c-visual-basic-lab-view-2259/
http://antiguo.itson.mx/die/eromero/biblioelec/blabsd2/p6_sd2_p02.pdf
http://www.robotsdebasura.com.mx/content/section/5/26/
Suscribirse a:
Entradas (Atom)